
数字制造讲义01-成为数字世界的建造者
数字制造讲义02-Arduino入门
数字制造讲义03-电路基础
快速回顾
让我们先回顾上节课的内容。
电路是由导体和元件组成的回路,电流可以在其中流动。电路有三种状态:通路,开路(某处断开)和短路。

闭合回路在同一点开始和结束,形成一个完整的循环,允许电力不间断地从(+)电源流到( - )地。短路是指,电路中有很大电流流过,但不流过负载,负载不起作用。

电路图通过符号表示电子元件及其位置。
电阻器通常用于限流,我们用欧姆定律计算电路中所需电阻阻值。更复杂的电路则需要用基尔霍夫定律。
电路类型
有了基本的电路元件,我们可以构建出不同类型的电路。除了通路、开路和短路,电路还有其他的分类方法。
比如,从构成来分,可以分为电气电路和电子电路两大类。电气电路由电阻、线圈、电容组成。电子电路除了电阻、线圈和电容之外,还包括晶体管和二极管等半导体元件。
按照功能来分,又分为以下类型的电路:
放大电路:用于增大输入信号并且输出,例如常见的 Amplifier/功放
振荡电路:使电路在没有输入信号时也能产生交流信号
调制电路:可以调制振幅大小(AM)或频率(FM)的电路

检波电路:从信号中提取声音等(调幅波解调)

滤波器:提取指定频段的信号
%20%E6%BF%BE%E6%B3%A2%E6%8A%80%E8%A1%93%E7%B0%A1%E4%BB%8B.files/image005.gif)
运算放大器:能产生一个比输入端电势差大数十万倍的输出电势(对地而言)。集成电路的一种,输入输出互不影响。

逻辑电路:计算加法、乘法、记忆数字/文字

电源电路:交流直流电转换
我有千里眼,你有顺风耳吗?
在初学电子电路知识时,很容易被种类繁多的电子元件搞晕。想要一种一种元件学习,不是不可能,但是没必要。我们需要提醒自己,学习电路的目标是做出自己需要的东西,带有功能和互动的装置。
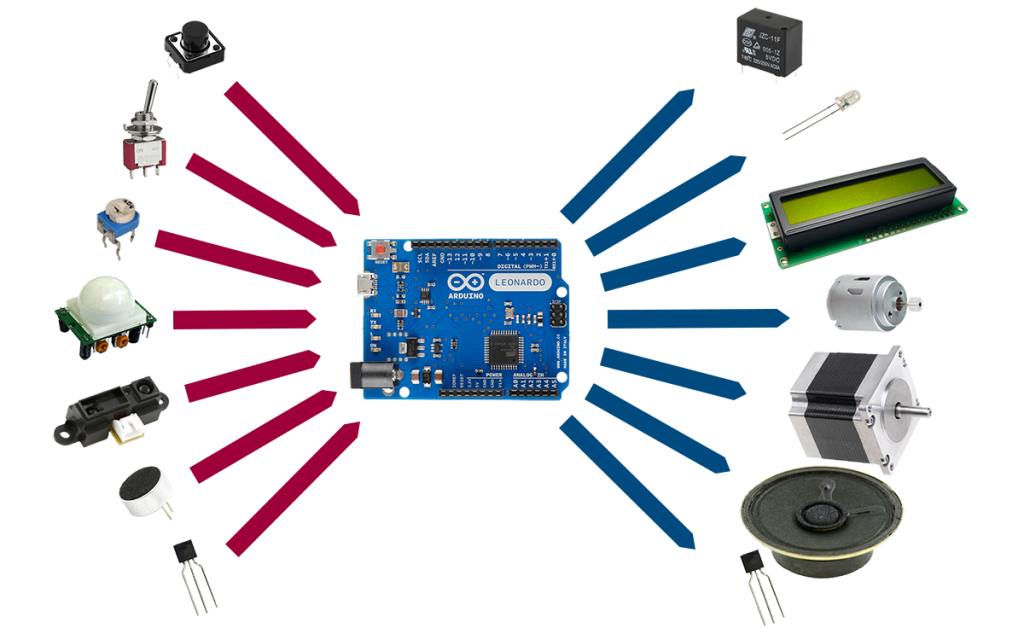
电子元件虽然名目繁多,但是从用途来分,除了上节课介绍过的基本元件,接下来就是这节课要学习的两大类:输入类和输出类。
输入类元件帮助我们感知和获取环境中的信息/状态,输出类元件负责向环境施加影响,例如展示数字/图像、移动物体等等。

想象一下人体,可以类比为装备着强大输入输出设备的智能体。输入设备包括眼睛、鼻子、耳朵、皮肤等,可以感知并接收图像、运动物体、声音、气味、压力等等复杂多样的信息。而输出设备包括嘴巴、身体关节和肌肉等,可以发出声音、做动作、移动物体等等。
当然,电子元件能够做的事情就更多了,比如,测量土壤湿度、测量脉搏、获取蓝牙信号等等。这些由各显神通的元器件来实现。
输入设备
我们借助输入设备,实时获取环境中的各种信息。
开关
开关也是一种设备?没错,电路本身就是一个小环境,这个小环境最重要的状态之一,就是电路是否形成通路。(聪明的你应该意识到,开关同时也是一种输出设备)
不要小看了开关,它有多种类型,可以控制多种状态。比如有按钮类型的,toggle 类型的,还有开关组:

声音
检测环境中声音大小的元件(更高级一些的可以提取声音包络,或者做语音识别)。猜猜看,这类元件价格是多少?

距离
超声波传感器的本领,是不断发出探测距离的超声波,计算并报告元件距离目标物体(障碍)的距离:

温度
测量温度的元件大多数都是热敏电阻,也就是阻值随着温度发生变化。

光照
测量光照亮度的元件大多数都是光敏电阻,也就是阻值随着亮度发生变化。

图像
想要识别物体,首先要获取图像。摄像头就是最常见的设备。现在的摄像头已经做到体积微小、成像高清。
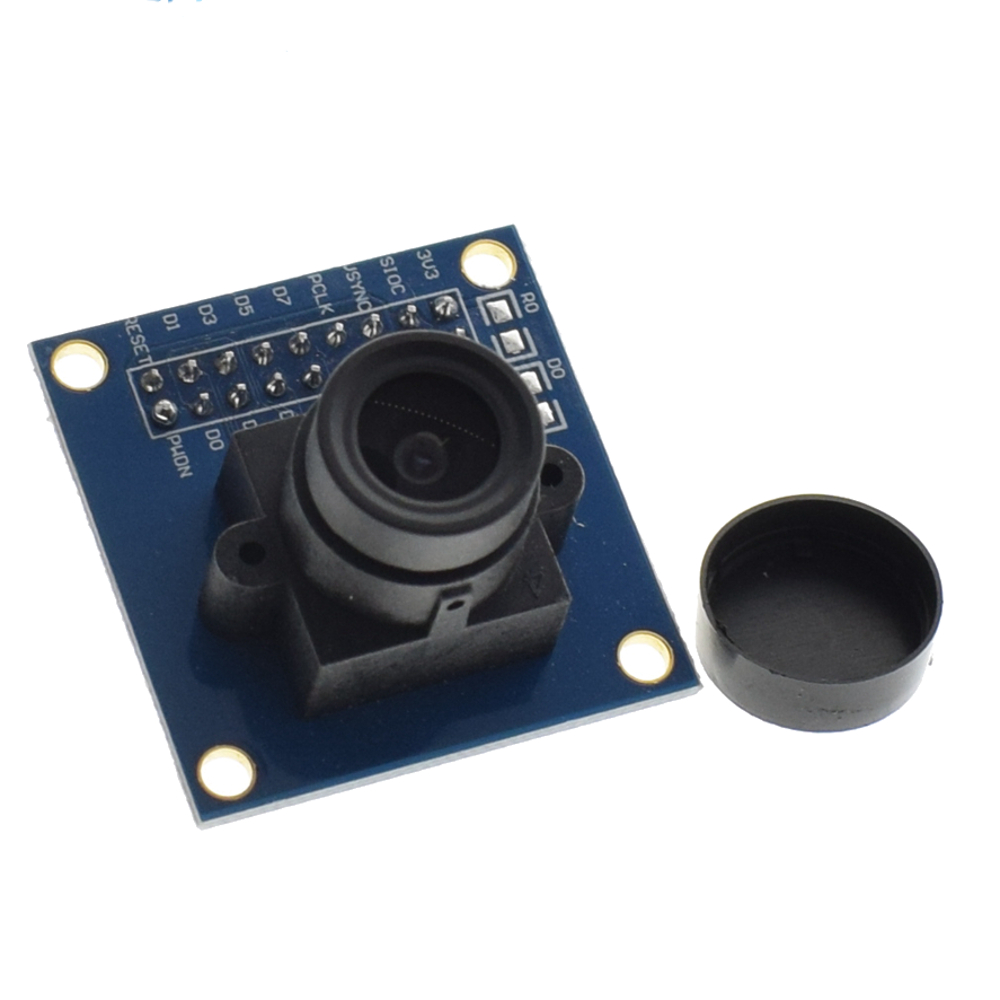
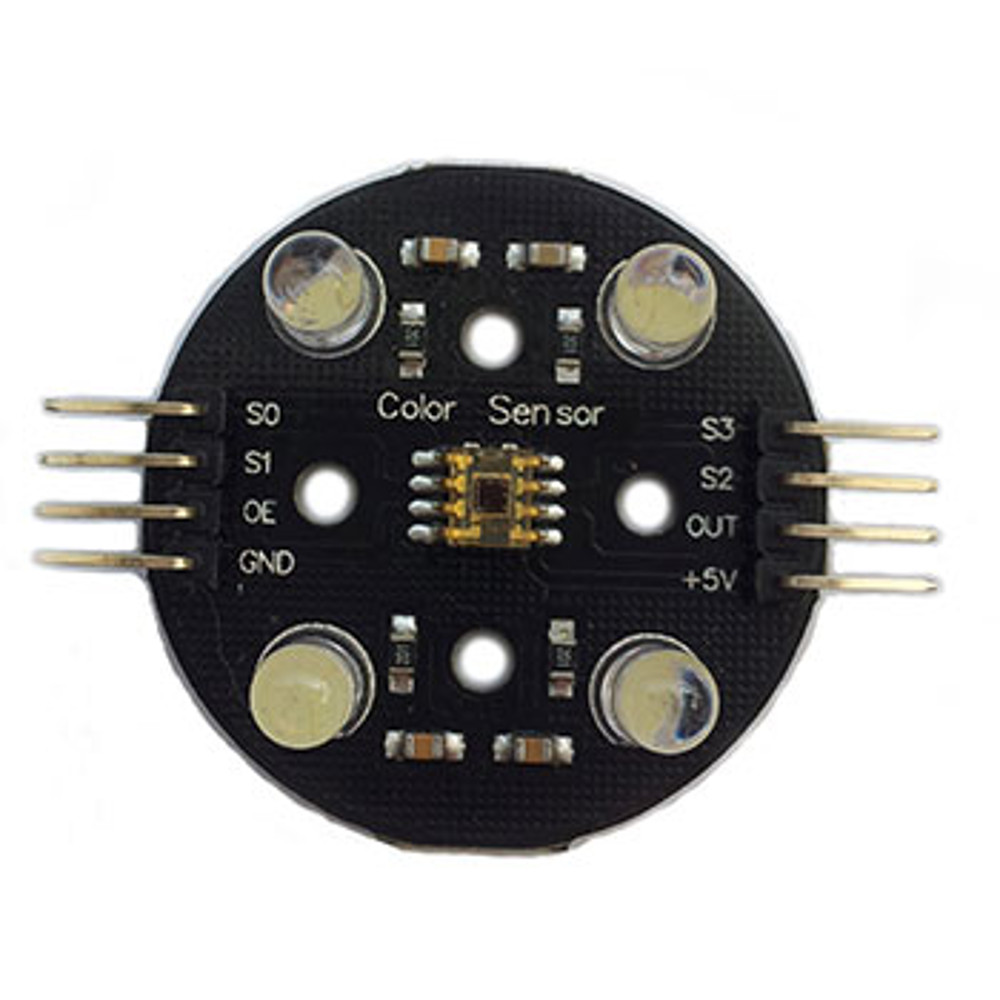
另外一种传感器可以专门检测 RGB 的颜色值:
压力
压电传感器用来检测振动或敲击。


磁场
我们常见的磁铁也是一种电子元件哦~

霍尔效应传感器也称霍尔传感器,是一个换能器,将变化的磁场转化为输出电压的变化。

红外
互动装置总是少不了人的参与,其中经常会用到的一个元件,是检测某个距离内是否有人出现的红外传感器。

应变计
应变计是电阻随作用力变化的传感器;它将力、压力、张力、重量等物理量转化为电阻的变化,从而测量这些物理量。当外力作用于固定物体时,就会产生应力和应变。物体内部产生的(对外力的)反作用力即为应力,产生的位移和形变即为应变。

例如基于应变计的称重传感器,将力转换为可测量的电信号输出的传感器。
加速计
加速计(accelerometer)也叫重力感应器,是测量加速度的装置。相对于远距感测的装置,它测量的是自身组件在某个轴向的受力情况,表现形式为轴向的加速度大小和方向(XYZ)。这有点类似于陀螺仪,但陀螺仪的更多关注自身旋转情况,加速计则主要是测量受力情况,也就是三轴运动情况,更适合用于空间运动判断。

陀螺仪(gyroscope)是一种基于角动量守恒理论感测与维持方向的装置。三轴陀螺仪的工作原理,是通过测量三维坐标系内陀螺转子的垂直轴与设备之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态。三轴陀螺仪可以同时测定上、下、左、右、前、后等6个方向,最终可判断出设备的移动轨迹和加速度。
常见的体感游戏机、手机里都有这种元件。

机器视觉
前面提到了获取图像的元件,也就是常见的摄像头。不过我们更常见的需求是用摄像头识别某些东西,比如人脸、比如让机器人拥有视力。所以,机器视觉相关的硬件和软件也是我们可能会用到的工具。
机器视觉是人工智能中一个重要的研究领域,相关的算法一直在改进。OpenCV 就是使用最为广泛的机器视觉开源库,它提供了实时识别形状和物体的能力,许多机器视觉的应用都是在它的基础上改进实现的。
当然,也有一些硬件已经集成了特定的视觉能力。
比如 OpenMV 项目提供低成本、可扩展、支持 Python 的机器视觉模块,成为「机器视觉的 Arduino」:

又比如 Pixy2 摄像头,能通过简单的训练快速识别物体:
 )
)
输出设备
看了这么多输入元件,是不是觉得人对环境的感知能力得到极大的扩展?这样我们可以收集无数来自环境的实时信息。接着,我们处理这些信息,或者设定一些规则,达到某些条件的时候,就自动去做某些事情。这就是智能硬件的基本原理。并不难,对吧?
接下来我们就了解一下输出设备,看看如果要对环境施加影响,我们都有哪些能力可以使用。
LED
严格来说,单个 LED 不算一类输出设备。但是它实在太常用了,而且多个 LED 组合起来,就可以成为可能性无穷的输出显示屏。

LCD
跟 LED 对应的还有另外一种专门用于显示的屏幕——LCD (Liquid Crystal Displays)。

扬声器
视觉的输出设备有了,接下来是听觉。那就是各种扬声器,也就是喇叭了。

电机/马达
听和看都有了,那么接下来就是运动了。运动涉及到物理位移,我们需要借助电机来完成。
电机有非常多种,分类也各不相同,比如直流电机(DC Moter)和交流电机。
在 DIY 装置中,常用到伺服电机、步进电机和舵机这几种。
伺服电机:闭环控制,即通过传感器实时反馈电机的运行状态,由控制芯片进行实时调节。

步进电机:开环控制,接收的是电脉冲信号,根据信号数量转过相应的步距角(角位移)。

舵机:是伺服电机在航模、小型机器人等领域下常用的一个特殊版本

小结
今天我们认识了很多新伙伴。你可能眼有点花,头有点昏。不要紧,在动手实践过程中会慢慢加深了解的。
现在,你已经踏上了自己折腾的旅程——有那么多好玩的东西等着你去搭建呢!
输入+Arduino+输出 可以实现无数的组合,只要你愿意细心查看元件的说明,按照电路的原理去设计接线,使用 tinkercad 等工具来模拟和检查电路,并且编写一些 Arduino 代码,理论上就可以做出许许多多好玩的东西。
嗯,理论只是理论。在实际动手的过程中,我们还会遇到这样那样的问题,可能是搞不懂某个元件的工作原理,可能电路总是出问题,可能是编程很吃力。这些都是成为 Maker 的过程中必不可少的锻炼。别忘记,我们还有 instructables、Arduino 等网站和社区,上面有海量的例子、项目和资料,是我们折腾路上很好的陪伴。
接下来就开始扑腾吧!享受淹没在新知中的缺氧感,享受遇到问题解决问题的痛苦,享受打完大小 boss 通关后的成就感。不要忘记跟大家分享你的点滴心得~

